Bac S |
Activité asservissement |
Sciences de l'ingénieur |
Afin de compléter les différentes fonctions de transfert de l'asservissement, à partir du cahier des charges et des questions précédentes :
Q4.1 - Calculer la vitesse Ns de déplacement angulaire du rayon laser en tour par minutes.
Pour obtenir cette vitesse de déplacement deux réducteurs sont placés entre le moteur et le pignon d’entraînement du laser. Le rapport de réduction global est de 1/936
Q4.2 - Calculer la vitesse angulaire Nmot en tour par minute à la sortie du moteur.
Pour augmenter la précision du capteur de position celui-ci est placer sur un arbre intermédiaire on veut obtenir pour un déplacement angulaire de 2 ° un déplacement angulaire de 90 ° du capteur.
Q4.3 - Calculer le rapport de réduction r2 du réducteur à placer entre l'axe d’entraînement du laser et l'axe du capteur, en déduire le rapport de réduction r1 de l’autre réducteur.
Q4.4 - Quelle est alors la vitesse angulaire Nc du capteur de position en tours par minute ?
Étude du capteur:
Le capteur de position est un potentiomètre de recopie, il est alimenté en +5V
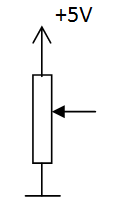
La plage électrique du potentiomètre est de 245 °, le capteur est implanté de façon à ce que pour la position de référence du laser, l'angle du potentiomètre soit de 75°
Q4.5 - Quels sont les angles de déplacement angulaires extrêmes du potentiomètre?
Q4.6 - Compte tenu de la plage électrique du potentiomètre calculer la résolution α en V/degré du potentiomètre
Étude de la fonction adapter la consigne:
Après calcul le système de traitement renvoie une consigne exprimée en en dixième de degré. La fonction de transfert associée à la fonction "adapter la consigne" est la suivante :
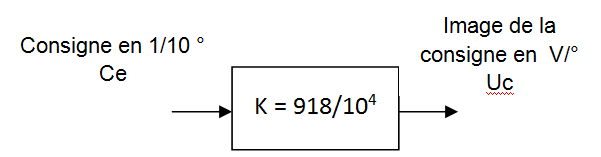
Q4.7 - Justifier la valeur de 918/104 (0,0918) pour K.
Q4.8 – Compléter le schéma ci-dessous de l'asservissement en position du module laser avec les valeurs des fonctions de transfert

|
|
|
Créé avec HelpNDoc Personal Edition: Générer facilement des livres électroniques Kindle