Bac S |
Activité asservissement |
Sciences de l'ingénieur |
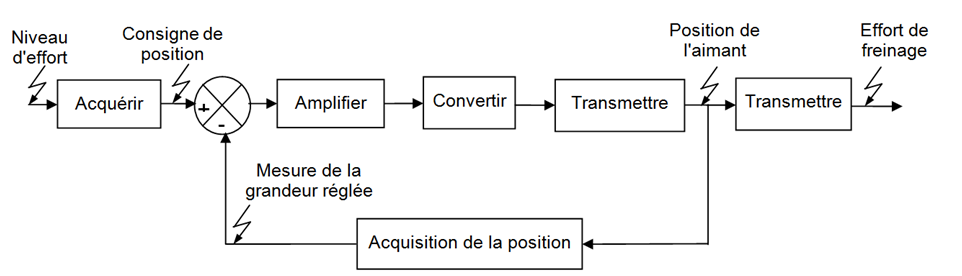
3- SIMULATION Le système de réglage d'effort correspond à un asservissement de position, il peut être modélisé comme suit :
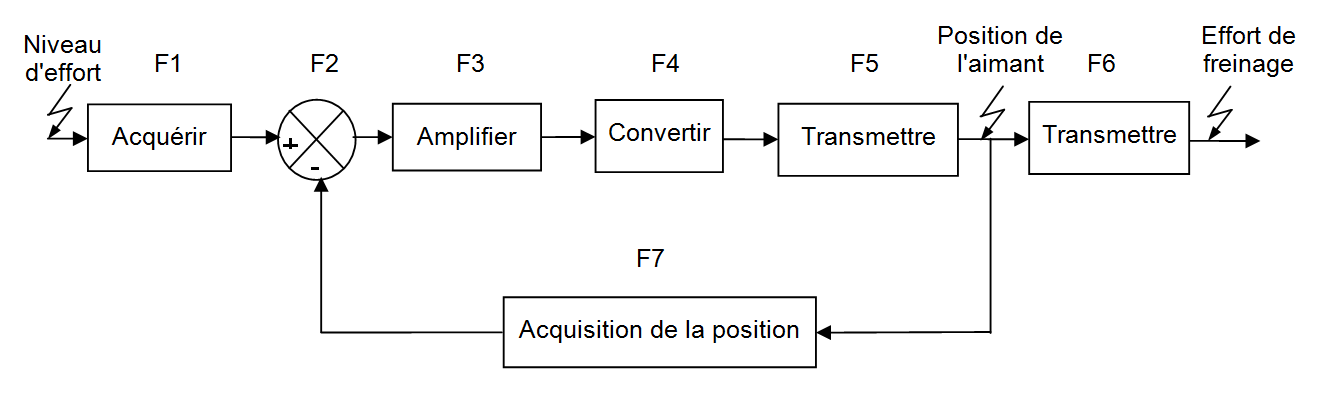
On vous demande d'identifier la structure matérielle propre à chaque fonction (FI, F2...) en complétant le tableau1.
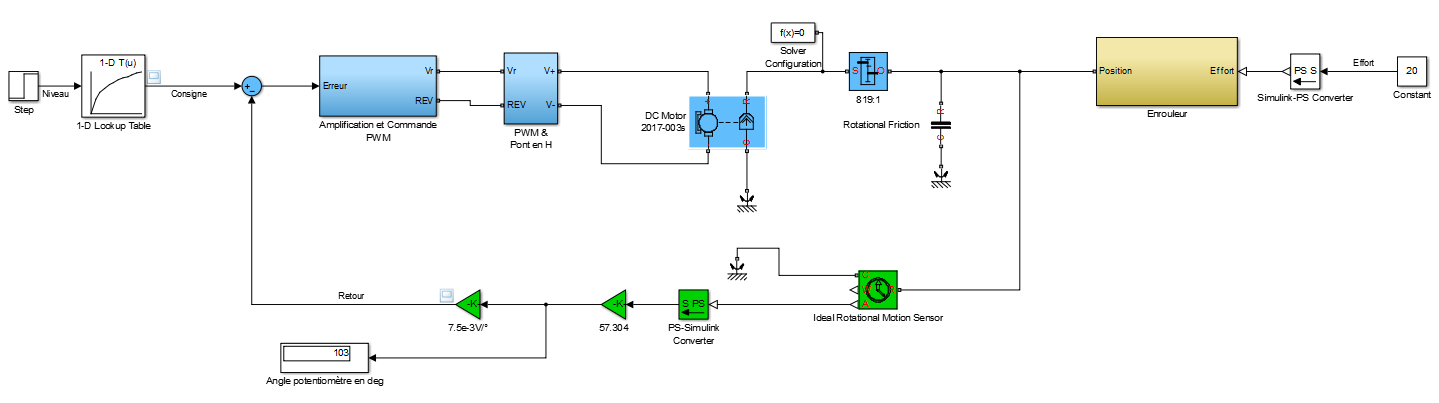
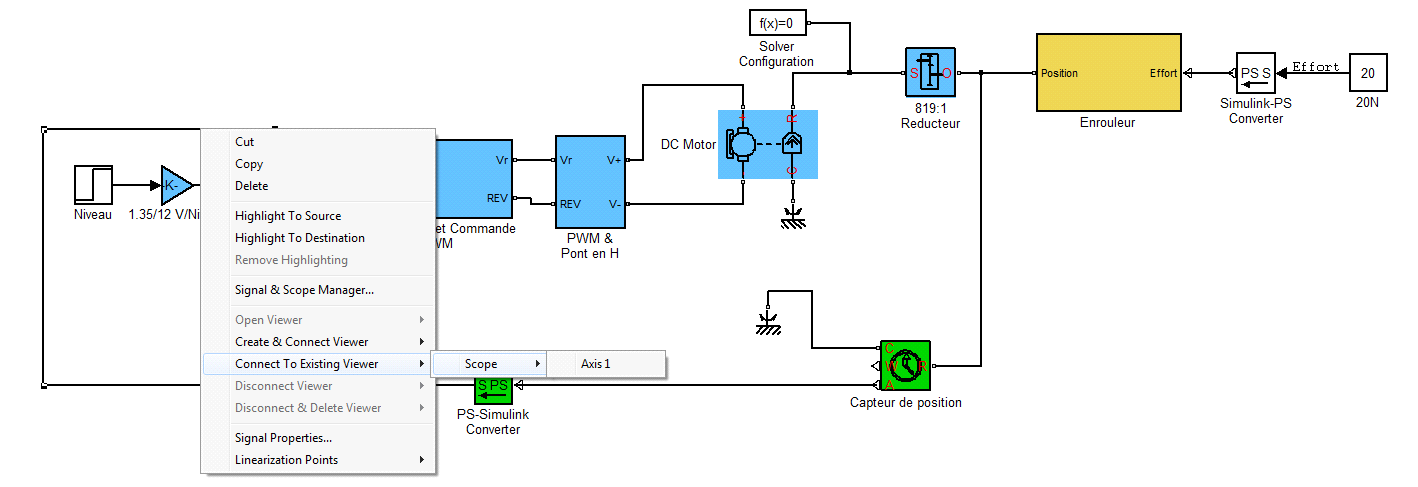
Nous allons maintenant simuler le fonctionnement de cette partie du système sous Matlab afin d'identifier l'ordre de l'asservissement et d'évaluer les écarts entre la consigne et la position angulaire de l'enrouleur. Sous Matlab ouvrir le model Velo_model_TP01. Le modèle de l'asservissement se présente sous la forme suivante :
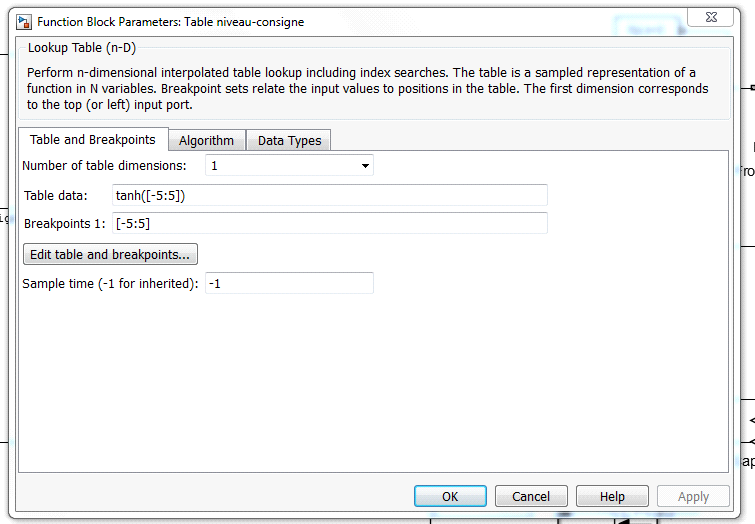
Afin de simuler le fonctionnement du système il faut compléter la table de correspondance entre le niveau d'effort souhaité et la consigne en volt à appliquer à l'entrée de la boucle. Cette table correspond au tableau de la première partie de l'activité puisque pour un niveau d'effort donné le potentiomètre fournie une tension image de l'angle de rotation de l'enrouleur, le moteur s'arrêtera quand la tension de consigne et la tension délivrée par le potentiomètre seront égales. Pour compléter la table Ouvrir la "Table niveau consigne " et la compléter avec dans la ligne Table data les valeurs de la tension UP2-P3 avec les tensions dans l'ordre croissant [0.10,0.33,………] chaque tension est séparée par une virgule et dans la ligne Breakpoints les niveaux dans l'ordre croissant [1,2,………] chaque niveau est séparé par une virgule
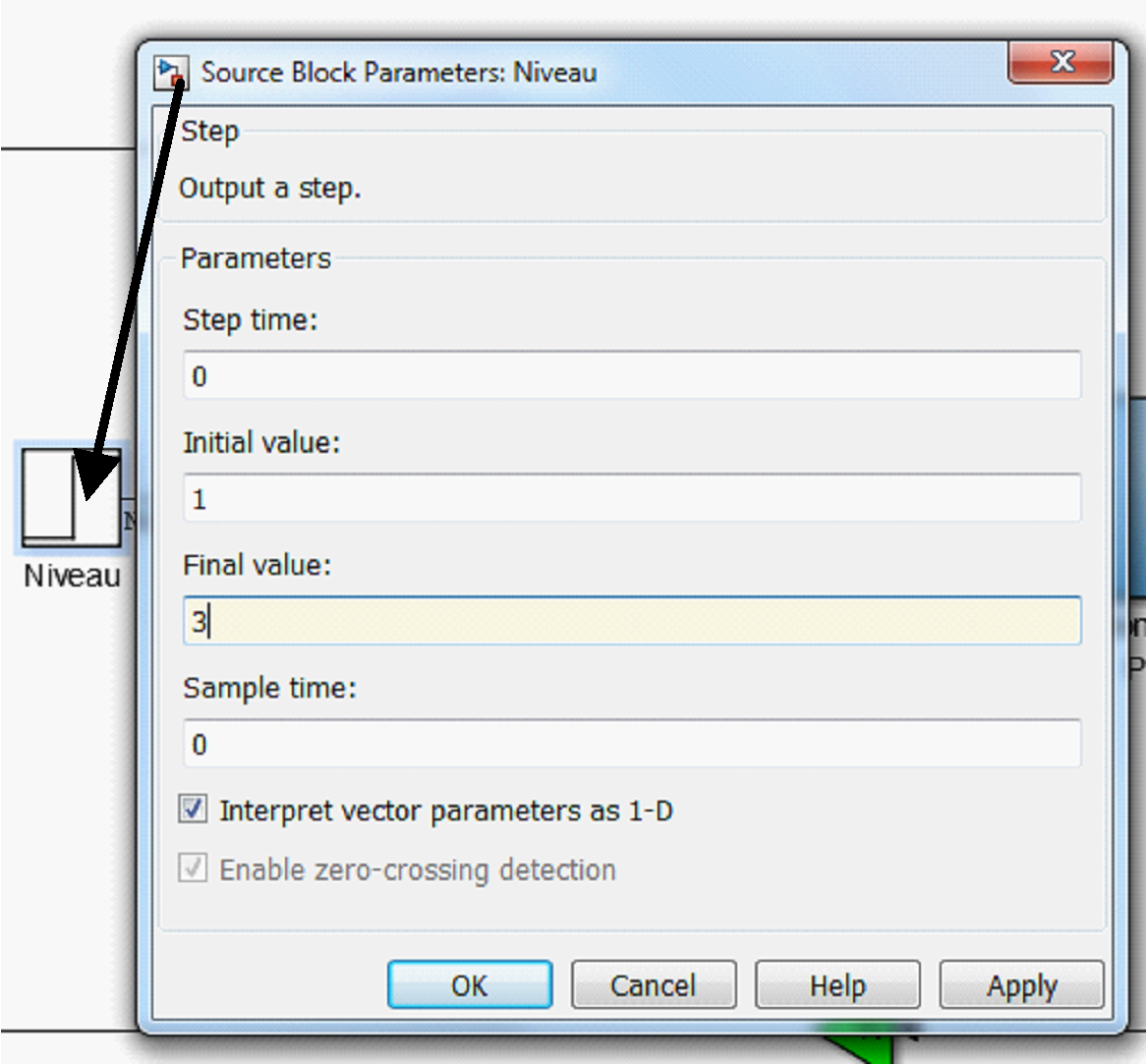
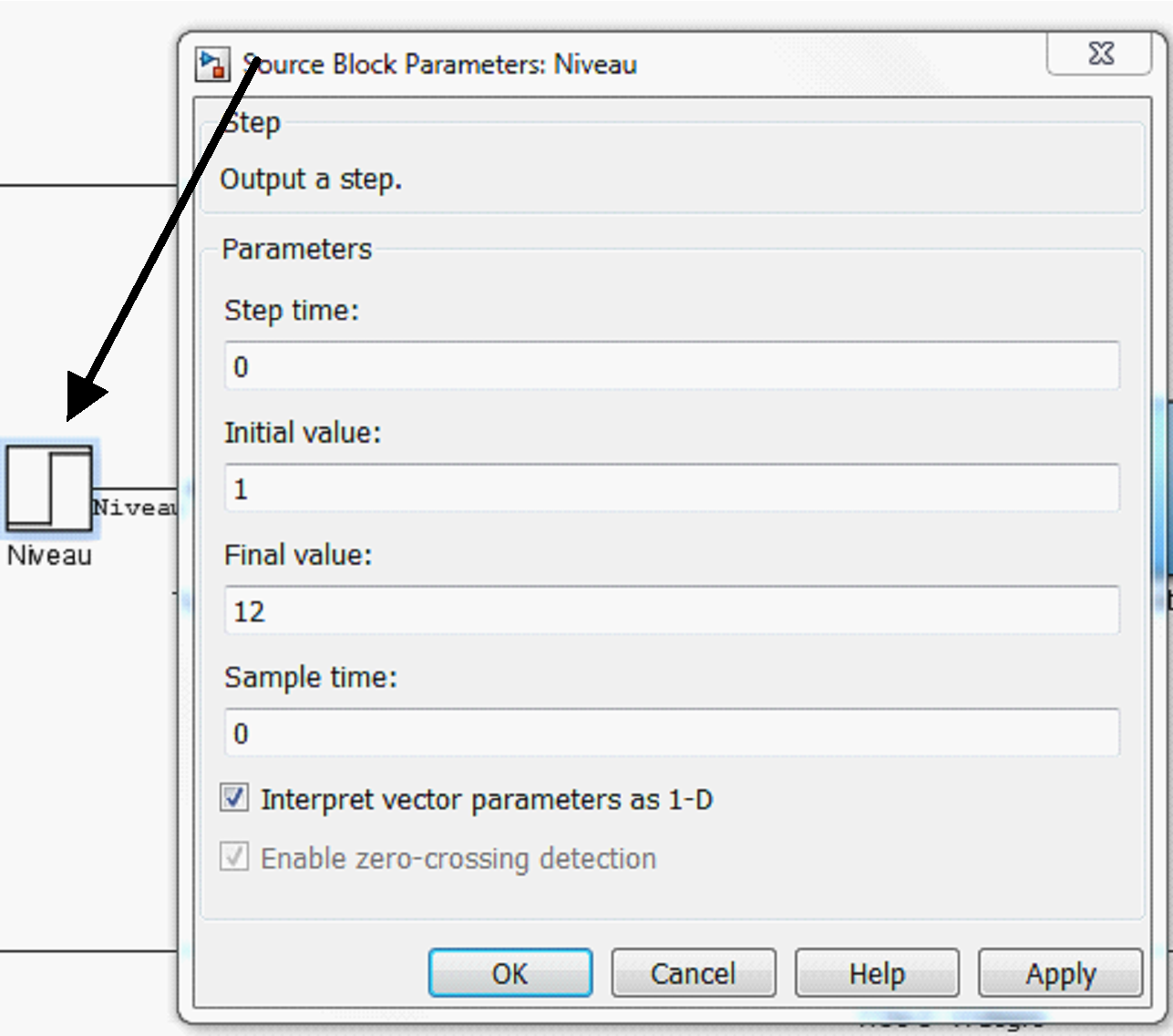
Vous devez maintenant relever l'angle effectué par le torsadeur pour les niveaux: 3-6-9-12 Ouvrir le "Block source :Niveau" et appliquer un échelon d'effort de 3 (de 1 à 3) Lancer la simulation pour 20s puis lire l'angle sur l'afficheur "Rotation enrouleur" ( angle potentiomètre en degrés) du model Vous devez maintenant relever la réponse indicielle du système pour cela : Ouvrir le "Block source :Niveau" et le configurer comme suit ( on applique un echelon d'éffort de 12 , valeur initiale 1)
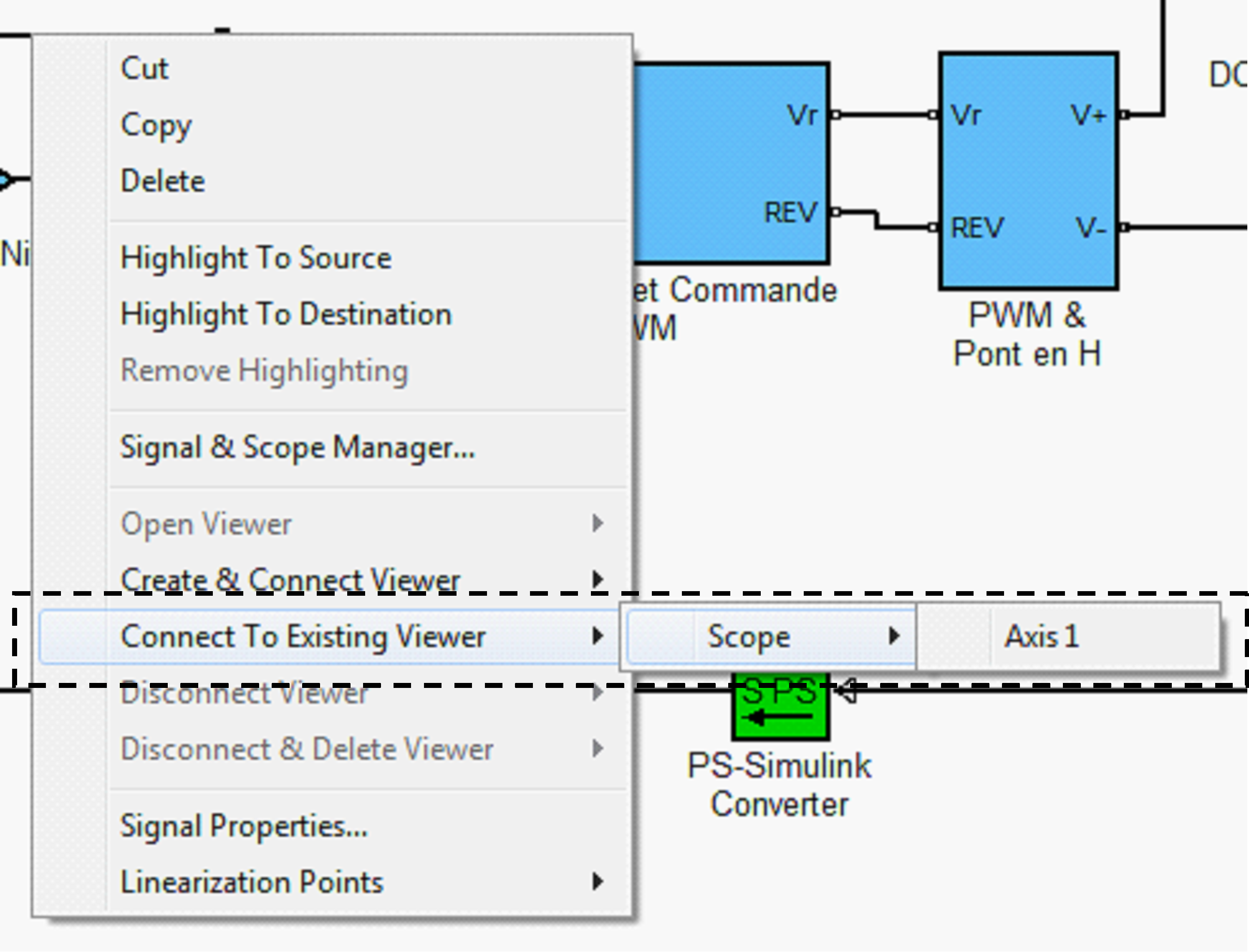
Placer un Wiewer scope sur l'entré + du comparateur. Connecter l'entrée – du comparateur sur le Wiewer scope
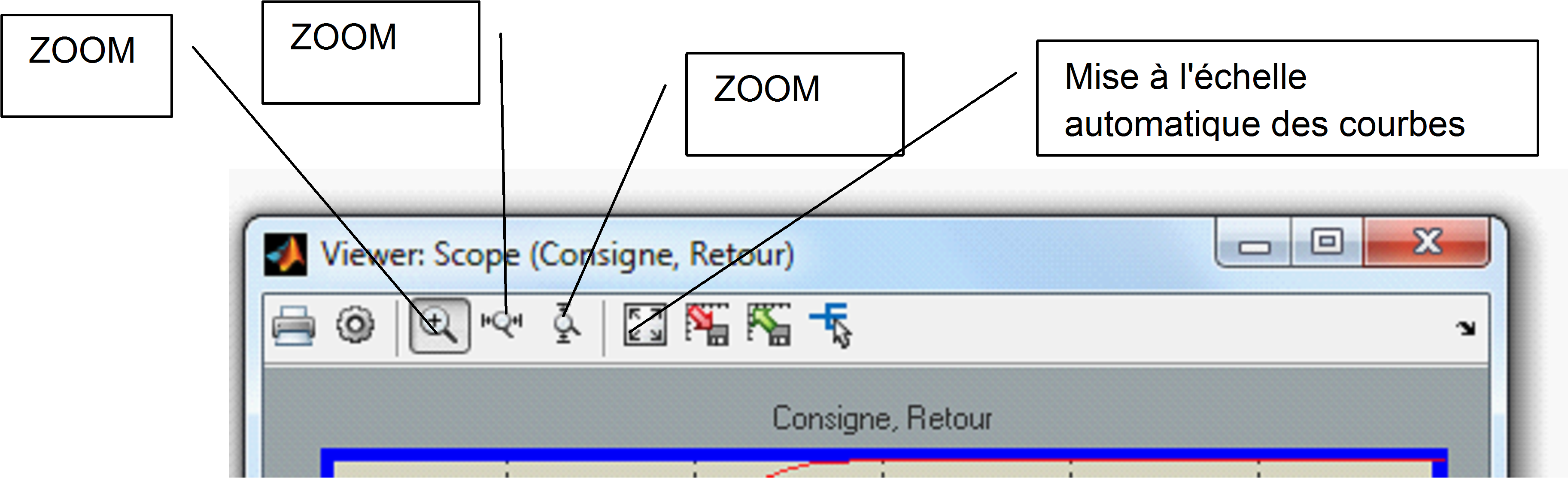
Lancer la simulation pour 20s Double cliquer sur un des icônes du "Wiewer scope" pour afficher le résultat de la simulation Imprimer deux relevés, le premier sans zoom et le deuxième avec un zoom au niveau de l'origine. Comparer l’évolution de la courbe aux alentours de l’origine des axes avec la courbe ci-contre
Évaluation des écarts : Relancer une simulation et mesurer l'écart en sortie du comparateur.
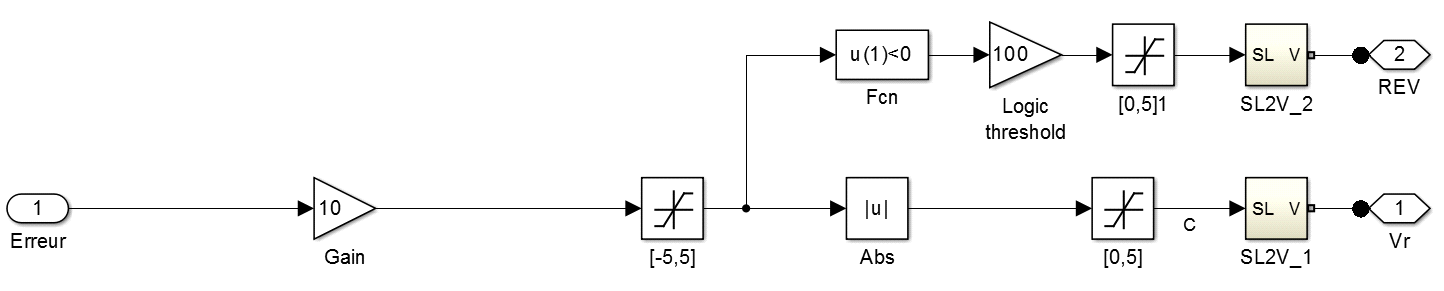
Nous allons essayer de diminuer cet écart en ajoutant un correcteur à la boucle de l'asservissement. Double cliquer sur le bloque "Amplification et Commande PWM" le schéma bloque suivant apparaît:
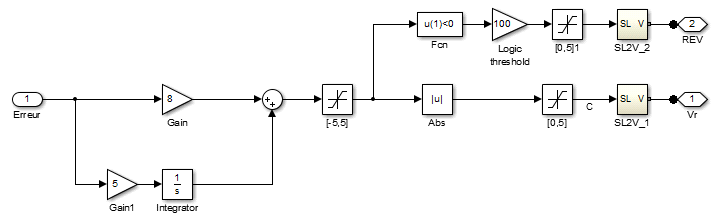
Vous allez insérer dans la boucle un terme intégral qui a pour fonction de diminuer l'erreur. A partir de la bibliothèque Simulink ( Librairies Simulink Commonly Used Blocks )
|
|||||||||||||||||||||||
Créé avec HelpNDoc Personal Edition: Créer des documents d'aide HTML facilement