Bobines et vitesse de synchronisme
- Précédemment on a vu le principe de la création d'un champ tournant. Le stator est constitué de trois bobines qui créent un champ magnétique tournant bipolaire (un pôle nord et un pôle sud).
- La vitesse de synchronisme de ce champ est égale à la vitesse angulaire du réseau soit 50 cycles par seconde, ( 50 Hertz), ce qui est équivalent à 50 tours/seconde ou 3000 tours par minute.
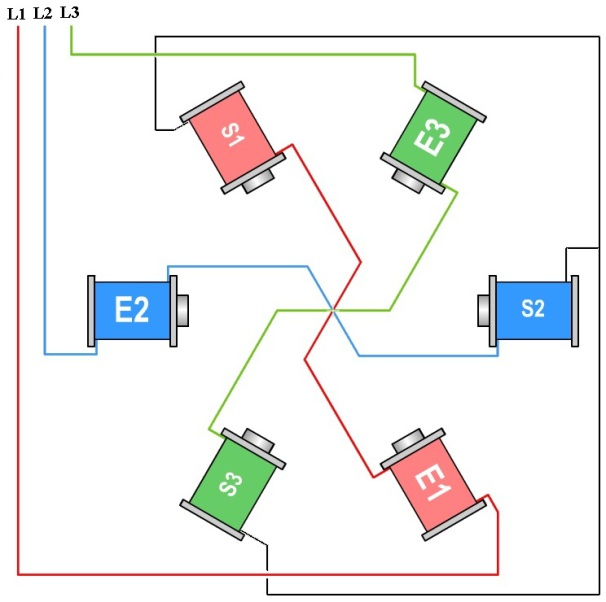
- Dans la réalité, le stator d'un tel moteur n'existe pas car pour obtenir un fonctionnement normal et un bon rendement, il doit comporter 6 bobines.
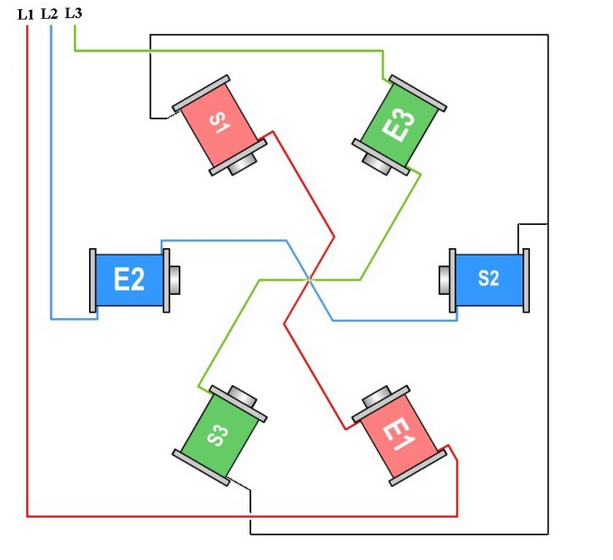
Une bobine par phase et par pôle. Un moteur constitué de deux pôles magnétiques aura 6 bobines (3 phases x 2 pôles)
La vitesse de synchronisme "ns" d'un moteur dépend de son nombre de pôles.

Un moteur asynchrone triphasé tourne à 1200 tr/mn. La vitesse de synchronisme immédiatement supérieure est de 1500 tr/mn. Le stator de ce moteur est constitué de 4 pôles, (2 paires).
Un moteur asynchrone triphasé tourne à 980 tr/mn. La vitesse de synchronisme immédiatement supérieure est de 1000 tr/mn. Le stator de ce moteur est constitué de 6 pôles, (3 paires)
Dans un moteur deux pôles ou bipolaire, les phases sont décalées de 120° entre elles mécaniquement.
Elles sont réparties sur 360° et créent électriquement 360°. Donc un cycle est égal à un tour.
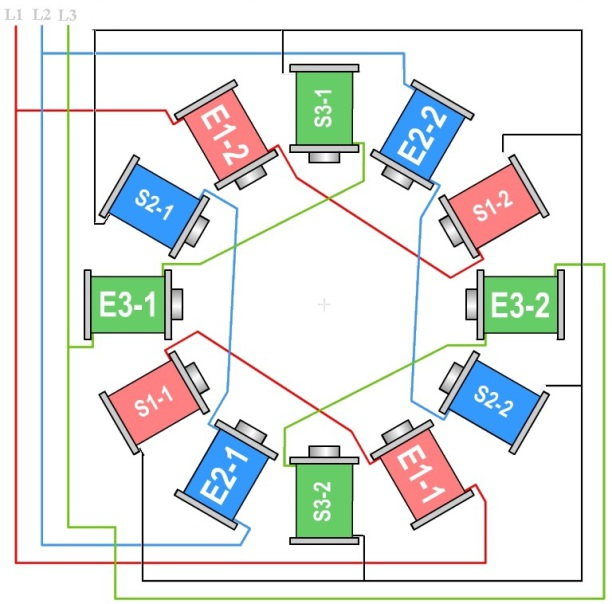
Dans un moteur quatre pôles, ou tétrapolaire, les phases sont décalées de 60° entre elles mécaniquement, (2 fois plus de bobines).
Les trois phases sont réparties sur 180° et créent toujours électriquement 360°.
Donc un cycle correspond à un demi-tour du moteur. Durant une période électrique, le moteur n'aura tourné que d'un demi-tour ou d'un tour sur deux périodes.
On comprend alors, que le moteur 4 pôles ira deux fois moins vite que le moteur 2 pôles.


Created with the Personal Edition of HelpNDoc: Easily create Qt Help files